
We build humanoid robots to mirror human proportions because evolution’s already cracked the code of efficient movement. Our bodies are nature’s perfect machine—balanced, adaptable, and crazy-smart in design. By copying human anatomy, we’re basically stealing the best engineering blueprint ever created. Want smooth, precise robotic motion? Seek no alternatives than the human template. Curious how deep this rabbit hole goes?
The Science of Mimicking Human Movement
Since the dawn of robotics, scientists have been obsessed with one wild question: can machines genuinely move like humans? Our quest for motion analysis has led us to incredible breakthroughs in robotic agility. Xsens inertial motion capture technology enables robots to learn precise human movement data through real-time tracking and human shadowing. We’ve discovered that capturing human movement isn’t just about copying steps—it’s about understanding the intricate dance of muscles, joints, and momentum. Using advanced motion capture technology, we can now teach robots to mimic everything from a delicate reach to a complex dance move. Neural network algorithms facilitate precise movement learning by analyzing muscle activation and joint mechanics with unprecedented depth. Machine learning algorithms decode our movements, translating human grace into mechanical precision. Think of it like digital choreography, where every twitch and turn is scientifically mapped. The result? Robots that move so naturally, you might just forget they’re made of metal and circuits. The ExBody2 Technology is revolutionizing how robots learn and replicate human movements with unprecedented accuracy.
Biomechanical Symmetry in Robotic Design
After watching robots stumble through human movements, we realized something profound: perfect motion isn’t just about copying—it’s about understanding symmetry.
Symmetrical mechanics aren’t just a fancy engineering trick; they’re the secret sauce that makes robots move with grace and purpose. By mimicking the balanced design of human and animal bodies, we create machines that distribute weight intelligently and move with unprecedented energy efficiency. Mechanical impedance control enables robots to dynamically respond to environmental interactions with unprecedented precision.
Symmetry is the hidden language of motion, transforming robots from mechanical tools into elegantly intelligent navigators.
Think of it like designing a perfect dance partner—every joint, every muscle working in harmonious coordination. Our robots aren’t just metal and circuits; they’re precision instruments that leverage geometric symmetries to navigate complex environments. Biomechanical principles enable robots to replicate natural movement patterns with increasing sophistication and precision.
The result? Humanoid robots that don’t just walk, but stride with a confidence that makes you wonder: Are they learning from us, or are we learning from them? Legged robots like Atlas demonstrate how robotic leg mechanics can precisely mimic human locomotion across challenging terrains.
Structural Efficiency Through Proportional Engineering

While most people imagine robots as clunky metal contraptions, structural efficiency is where the real magic happens.
We design humanoid robots with precision, focusing on robotic ergonomics that mirror human proportions. Advanced sensor technologies enable robots to capture intricate environmental details with unprecedented precision.
It’s not just about looking cool—it’s about creating machines that move like we do.
Structural aesthetics play an essential role in our engineering approach, allowing robots to navigate complex environments with grace and purpose.
Mechanical design research reveals that biomechanical alignment enables robots to transfer human-like movement principles directly into functional machine architectures.
Emerging humanoid robots like Figure 01 demonstrate technological convergence by precisely mimicking human physical capabilities for real-world industrial applications.
Kinematic Challenges in Humanoid Robot Development
Because making robots move like humans sounds easy on paper, we quickly discover it’s anything but simple. Bipedal locomotion challenges represent a fundamental obstacle in robotic design, where mechanical systems struggle to replicate human movement patterns. Deep reinforcement learning enables robots to develop more nuanced movement strategies through continuous computational adaptation. Inverse kinematics turns out to be a mind-bending puzzle where every joint becomes a complex mathematical challenge. We’re basically trying to teach machines to move with the grace of a human, which is like asking a calculator to dance ballet. Kinematic chain complexity requires sophisticated computational models that map the intricate relationships between robotic joints and links.
| Challenge | Complexity | Solution |
|---|---|---|
| Dexterity | High | Advanced Algorithms |
| Movement | Complex | Biomimetic Design |
| Control | Intricate | Computational Models |
The real trick isn’t just programming movement—it’s understanding the subtle nuances of human motion. Our robots need to balance, adapt, and respond like living beings. We’ve got numerical methods and sophisticated algorithms, but replicating human dexterity is still more art than pure engineering. Who knew teaching a machine to walk could be harder than teaching a toddler?
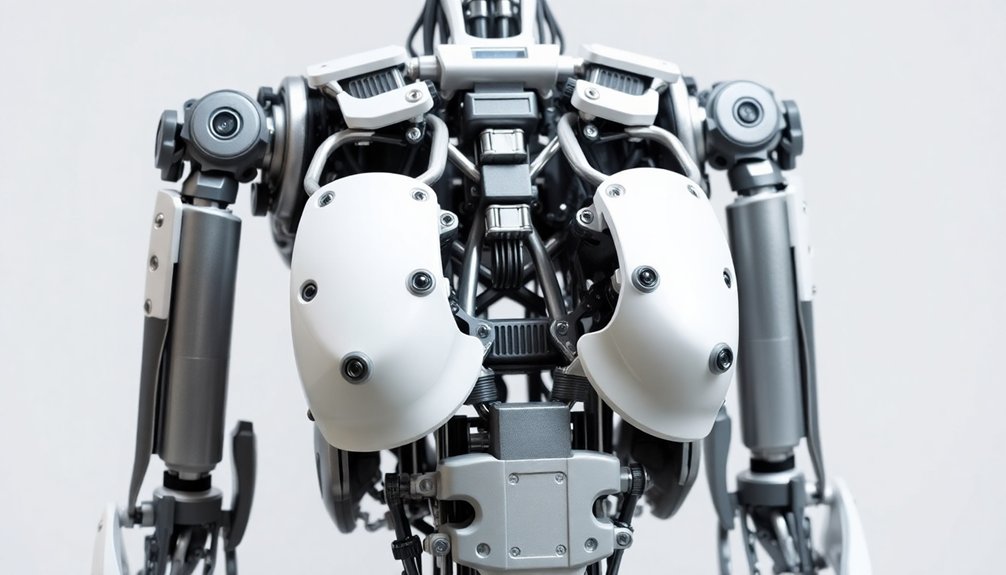
Material Selection and Mechanical Performance
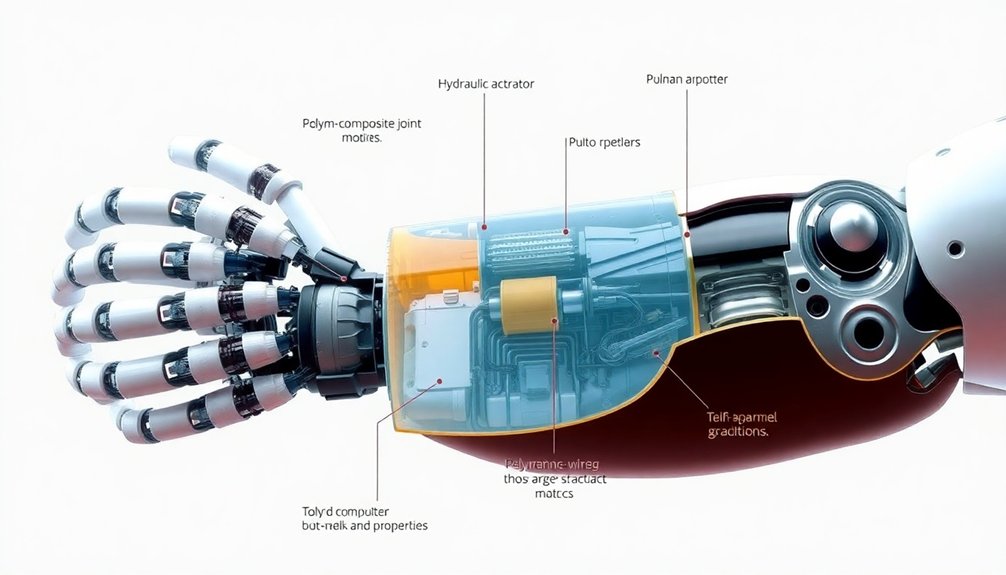
We’re not just building robots; we’re crafting mechanical athletes that need to be strong yet nimble, with materials that can take a beating without weighing us down like clunky tin cans. Materials like CFRP and UHMW-PE fiber provide the critical strength-to-weight optimization that enables these machines to mimic human biomechanical performance with unprecedented precision. Advanced bearing technologies like precise rotary mechanisms enable these robots to achieve smooth, human-like joint movements that replicate natural motion with extraordinary accuracy. Biohybrid muscle technologies are transforming robotic design by integrating living muscle tissues that can adapt and respond with unprecedented biological precision.
Our approach to humanoid robot design hinges on finding the perfect balance between lightweight structural integrity and mechanical performance – think carbon fiber muscles and titanium bones that can leap, pivot, and absorb shock without breaking a sweat.
Lightweight Structural Integrity
When designing humanoid robots that won’t collapse like a cheap card table, engineers have to get seriously clever about material selection and structural performance.
We’re talking lightweight durability that doesn’t sacrifice strength—carbon fiber, aluminum alloys, and advanced plastics are our secret weapons.
Structural optimization isn’t just fancy engineering; it’s about creating robots that can actually move without falling apart. By carefully mapping materials and using techniques like topological design, we strategically remove excess weight while maintaining critical load-bearing capacities.
Think of it like building a superhero: every gram matters, every joint needs precision, and failure isn’t an option.
How do we make robots that are simultaneously light as a feather and tough as nails? Careful engineering, that’s how.
Material Performance Metrics
If engineering humanoid robots were easy, every garage tinkerer would be building their own mechanical buddies.
When we plunge into material performance metrics, it’s all about finding the sweet spot between durability and design. We’re looking at joint position accuracy, velocity, and energy consumption – fundamentally, how smoothly our robotic friends can move.
Material durability isn’t just a buzzword; it’s about creating joints that can handle repetitive motion without falling apart. The elasticity comparison between human muscle and robotic components becomes a complex dance of engineering precision.
We want robots that can move like us, but last way longer. Think of it like creating a superhuman version of ourselves – strong, precise, and capable of performing tasks without breaking a sweat (or a circuit).
Challenging? Absolutely. Impossible? Not a chance.
Mechanical Load Distribution
Because building a humanoid robot that doesn’t look like a drunk toddler wandering through a hardware store is harder than it sounds, mechanical load distribution becomes our ultimate challenge.
We’ve learned that creating human-like movement isn’t just about mimicking motion—it’s about understanding how forces actually flow through a robotic system.
Our load balancing strategy involves:
- Strategic actuator design to manage joint stress
- Precise weight distribution across robotic structure
- Implementing Zero Moment Point (ZMP) calculations
- Selecting materials that can handle dynamic movement
Fundamentally, we’re translating human biomechanics into mechanical engineering principles.
Every joint, every movement requires surgical precision. We’re not just building machines; we’re crafting mechanical mimics that can walk, balance, and potentially outperform human physical capabilities.
The future isn’t just about robots—it’s about understanding movement itself.
Computational Modeling of Human-Like Robotics
Computational modeling of human-like robotics isn’t just about building fancy metal friends—it’s about creating intelligent systems that can think, learn, and interact like we do.
We’re developing computational models that mimic human behavior by diving deep into brain-inspired architectures and generative frameworks. Think of it like teaching a robot to be less “robot” and more “buddy.”
We use sophisticated techniques like Variational Autoencoders and neural network designs that help robots understand emotional states, predict actions, and collaborate with humans.
Our goal? Creating machines that don’t just follow commands, but actually comprehend context, intention, and social nuance.
It’s not sci-fi anymore—it’s engineering intelligence that bridges the gap between human complexity and robotic precision.
Functional Adaptation in Robotic Body Architecture
After teaching robots to think like humans, we’ve got to make sure they can move like us too.
Our robotic ergonomics focus on creating an anthropomorphic form that mimics human capabilities. We’re building machines that aren’t just smart, but physically adaptable:
- Lightweight materials reduce power needs
- Flexible joints enable complex movements
- Strategic actuator placement mirrors human muscle groups
- Proportional body design matches human kinematics
The goal? Robots that slide into human environments as naturally as a new coworker.
We’re engineering machines that don’t just look human, but move with the same fluid grace. By carefully mapping joint ranges, muscle actuation, and dynamic stability, we’re transforming robots from clunky machines to nimble partners.
Who said robotics can’t be an art form?
Performance Optimization Through Anthropomorphic Design

We’re tackling the holy grail of humanoid robotics: how to make machines move like humans without looking like awkward wind-up toys.
Our approach focuses on maximizing movement efficiency by studying biomechanical design principles that mirror human joint mechanics and muscle coordination.
Movement Efficiency Maximized
Since humans move with incredible grace and efficiency, engineers have been obsessed with cracking the code of anthropomorphic robot design.
We’re basically reverse-engineering human movement through cutting-edge robotics. Our goal? Total efficiency optimization across robotic systems.
Here’s how we’re making robots move like humans:
- Analyzing precise joint mechanics and muscle coordination
- Developing adaptive motion control algorithms
- Mimicking natural trajectory generation patterns
- Implementing real-time movement adjustments
Biomechanical Design Principles
The pursuit of humanoid robotics hinges on cracking nature’s most complex design challenge: replicating human movement with mechanical precision.
We’re fundamentally reverse-engineering evolution’s greatest hit: the human body. Our biomechanical design principles focus on matching robotic flexibility with precise motion dynamics. By mirroring human skeletal structures and proportional mass distributions, we create machines that move more like us and less like clunky metal puppets.
Strategic tendon stabilization and artificial musculature help us simulate the elegant complexity of human joints. Think of it like choreographing a dance where every mechanical movement feels natural and intentional.
We’re not just building robots; we’re translating biological engineering into silicon and steel, transforming how machines interact with our world.
Task Adaptation Strategies
As robots inch closer to mimicking human flexibility, task adaptation becomes less about programming and more about intuition. In human-robot collaboration, we’re developing adaptive planning strategies that transform robotic interactions:
- Recognize human intent in real-time
- Dynamically adjust motion policies
- Reduce operator workload
- Enhance mission flexibility
Anthropomorphic design isn’t just about looking human—it’s about thinking human. We’re teaching robots to predict, adapt, and respond like intelligent teammates.
Imagine a robot that doesn’t just follow instructions, but understands context, reads subtle cues, and adjusts its approach on the fly. It’s not sci-fi; it’s engineering evolution.
People Also Ask
How Expensive Are Humanoid Robots Compared to Traditional Industrial Machines?
We’ve found humanoid robots are considerably pricier than traditional industrial machines, with production expenses ranging from $100,000 to over $1 million, compared to industrial robots’ $20,000-$400,000 cost comparison.
Can Humanoid Robots Experience Fatigue Like Human Workers Do?
We’ll shatter your expectations: humanoid robots don’t experience fatigue like humans! Their robotic endurance stems from mechanical systems that resist traditional wear, enabling continuous performance without biological exhaustion.
What Prevents Humanoid Robots From Replacing Human Workers Entirely?
We can’t replace human workers entirely due to our limitations in skilled labor, emotional intelligence, and adaptability, which prevent complete job displacement across complex workplace environments.
Are There Ethical Concerns About Creating Human-Like Mechanical Beings?
We’re deeply concerned about robot rights and the moral implications of creating humanoid beings that blur lines between machines and potential sentient entities, challenging our ethical boundaries and understanding of consciousness.
How Close Are Current Humanoid Robots to Human Movement Capabilities?
We’ve made significant strides in robotic mobility advancements, but our current humanoid robots only achieve about 60-70% of human-like dexterity, falling short in complex movement and energy efficiency.
The Bottom Line
We’ve uncovered why humanoid robots mirror our body’s blueprint: it’s not just mimicry, but pure engineering brilliance. By borrowing nature’s design, we’re creating machines that move with stunning precision. Our journey reveals robots aren’t just metal and circuits—they’re sophisticated symphonies of biomechanical intelligence. The future isn’t about replacing humans, but extending our capabilities through ingenious mechanical choreography.
References
- https://koasas.kaist.ac.kr/bitstream/10203/3025/1/Development of Humanoid Robot Design Process.pdf
- https://www.wevolver.com/article/design-considerations-for-humanoid-robots
- https://www.machinedesign.com/learning-resources/whitepaper/55266095/texas-instruments-humanoid-robot-system-design
- https://techunited.nl/media/files/humanoid/MaartenDekker_GRAD2010_Mechanical_design_of_a_humanoid_robots_lower_body.pdf
- https://scispace.com/pdf/design-guidelines-for-development-of-humanoid-robot-design-2g0i2nj8b4.pdf
- https://www.movella.com/resources/cases/humanoid-robots-learning-human-movement-using-xsens-motion-capture
- https://www.livescience.com/technology/robotics/watch-humanoid-robots-waltzing-seamlessly-with-humans-thanks-to-ai-motion-tracking-software-upgrade
- https://news.las.iastate.edu/2025/02/21/bowen-wengs-research-aims-to-make-humanoid-robots-not-only-cool-but-safe/
- https://www.ncbi.nlm.nih.gov/books/NBK299034/
- https://today.ucsd.edu/story/learning-dance-moves-could-help-humanoid-robots-work-better-with-humans

