Humanoid robots learn to walk by fundamentally becoming tiny scientists, using sensor networks that act like digital nervous systems. They practice falling—yes, falling—and recovering through neural networks that mimic human movement patterns. Servos and algorithms collaborate to shift weight, detect balance, and correct motion in milliseconds. It’s less about walking and more about controlled, continuous almost-falling. Curious about how machines might someday outpace human locomotion? Stick around.
The Science of Bipedal Motion
While humans have been walking on two legs for millennia, robots are now catching up—and they’re doing it with some seriously cool engineering.
Bipedal locomotion isn’t just about mimicking human movement; it’s a complex dance of mechanics and math. Control Algorithms work like a robotic brain, helping machines balance and adapt to crazy terrain.
Imagine robot feet packed with sensors that feel every bump and tilt, instantly computing how to stay upright. These mechanical marvels use mathematical models that fundamentally translate human walking patterns into precise robotic movements.

Unitree Go2
Meet the Unitree Go2 — a robot dog that walks, runs, jumps, and dances. It maps its environment…
Machine learning kicks in, letting robots learn from their own stumbles and wobbles—kind of like a toddler figuring out walking, but with way more computational power.
Humanoid robots are designed to excel in complex terrain navigation, combining sophisticated control systems with advanced bipedal movement techniques.
Who knew robots could be such quick learners?
Sensor Technologies in Balance Control
Six key sensors could be the difference between a robot that gracefully navigates terrain and one that face-plants spectacularly. Your humanoid robot’s balance isn’t magic—it’s pure sensor technology. Machine learning algorithms enhance these sensor inputs by rapidly processing environmental data and adapting robotic movement strategies in real-time.
Imagine six digital foot switches per foot acting like tiny robotic nerve endings, detecting every microscopic ground contact and tilt. These sensors aren’t just collecting data; they’re processing real-time feedback faster than you can blink.

Unitree G1
A premium humanoid robot for serious demos, events, education, and advanced interaction. Best when you want a stronger,…
Six digital switches per foot: robotic nerve endings transforming microscopic terrain data into lightning-fast reflexive balance.
Digital-to-analog converters transform multiple digital switch states into sleek analog signals, maximizing limited input/output capabilities. Advanced algorithms crunch this sensor data, enabling robots to dynamically adjust balance when unexpected bumps or shifts occur.
It’s like giving a robot superhuman reflexes—the ability to maintain balance with precision that would make a tightrope walker jealous. Who said robots can’t dance?
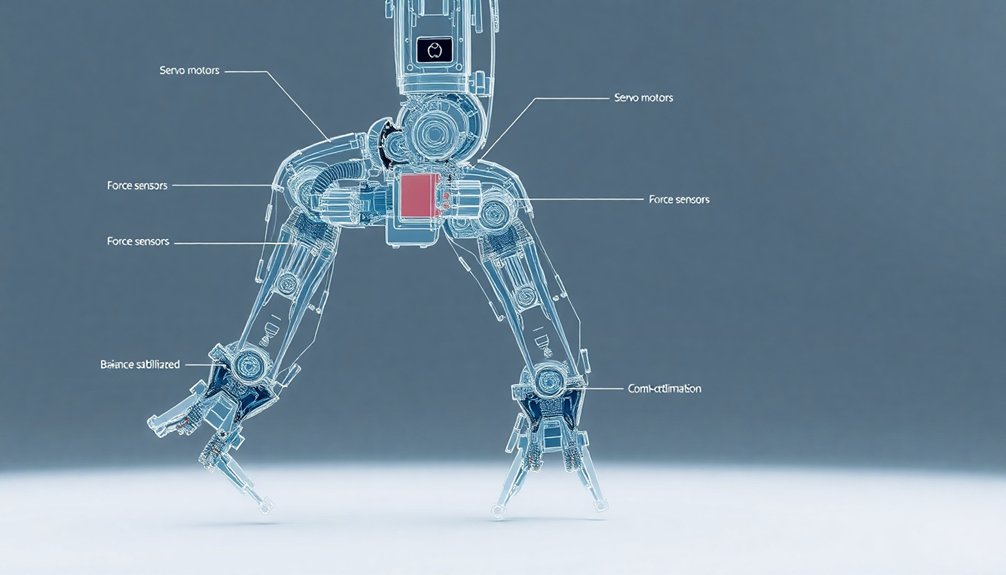
Mechanical Design of Robotic Legs
Because building a robot that walks isn’t just slapping metal limbs together, engineers have cracked the code of mimicking human locomotion through ingenious mechanical design. Humanoid robots aren’t just sci-fi fantasies anymore—they’re precision machines with servo-powered muscles that dance across lab floors. Planetary gears minimize mechanical backlash, ensuring each robotic step is calculated and precise with near-human accuracy.
| Component | Function | Complexity |
|---|---|---|
| Servos | Muscle Simulation | High |
| Foot Switches | Ground Detection | Medium |
| DAC Controllers | Movement Precision | Very High |
Each robotic leg demands a symphony of 12-18 servos, strategically placed to replicate human joint mechanics. Engineers obsess over lowering center of gravity and eliminating gear train slack—because one wobbly step could mean an embarrassing face-plant. The goal? Robots that move not just mechanically, but with an almost organic grace that makes you wonder: are we designing machines, or teaching metal to walk?
Neural Network Algorithms for Walking
Ever wondered how robots learn to walk without tripping over their own metal feet? Neural network algorithms are the secret sauce. Robotic locomotion training in advanced simulation environments allows machines to rapidly learn complex movement patterns.
These brainy bits of code help humanoid robots process massive datasets of human locomotion, teaching them to maintain its balance like a bipedal ballerina.
By using reinforcement learning, robots get constant feedback on their walking performance, allowing them to adjust and improve their gait through epic trial-and-error experiments.
Imagine a robot practicing walking across different terrains, learning to predict exactly how to shift its weight and prevent face-planting.
Deep learning techniques analyze every tiny motor control detail, making robotic movements smoother and more natural.
The result? Robots that can dynamically respond to environmental changes, turning clunky mechanical movements into something almost—dare we say—graceful.
Dynamic Stability and Gait Mechanics

When robots walk, they’re basically performing a high-stakes balancing act that would make a tightrope walker sweat. Dynamic stability isn’t just a fancy term—it’s the difference between a robot gracefully strutting or face-planting spectacularly.
Gait mechanics work like a complex dance, with sensors and actuators coordinating leg movements in real-time. Imagine tiny robotic brains constantly calculating balance, adjusting center of mass, and responding to ground conditions faster than you can blink.
Robotic legs: a high-speed ballet of sensors, calculations, and lightning-fast balance adjustments.
Machine learning algorithms help robots learn and refine their walking techniques, turning clunky first steps into smooth, energy-efficient locomotion. They’re basically teaching themselves to walk by continuously analyzing and improving their movement patterns.
Modular robot designs enable advanced biomechanical adaptations that allow for more sophisticated and responsive locomotion strategies.
Who knew robots could be such quick learners? The future of bipedal movement is looking less “awkward sci-fi robot” and more “nimble athletic machine.”
Fall Recovery and Real-Time Adaptation
If robots were gymnasts, their fall recovery skills would make Olympic athletes look like amateurs. These mechanical marvels aren’t just walking; they’re performing real-time adaptation that would make human reflexes look sluggish.
Fall recovery isn’t just a feature—it’s an art form driven by cutting-edge technology:
- Sensors like accelerometers and gyroscopes detect body shifts instantaneously, triggering lightning-fast stabilization responses.
- Advanced algorithms predict and counteract potential balance disruptions before you can blink.
- Continuous learning techniques allow robots to evolve their recovery strategies, fundamentally teaching themselves how to stay upright.
Imagine a robot getting pushed and recovering so smoothly you’d swear it had superhuman reflexes. That’s not science fiction—that’s today’s robotics, turning potential face-plants into graceful recoveries with math, sensors, and some seriously smart engineering.
Machine Learning in Locomotion Training
Because traditional programming can’t possibly keep up with the complexity of robot movement, machine learning has become the secret sauce that transforms clunky mechanical walkers into graceful, adaptive movers.
Humanoid robots now learn walking skills like toddlers—through trial, error, and epic wipeouts. By using simulated environments, these mechanical learners practice locomotion at lightning speed, receiving instant feedback on every wobble and step.
Sensors like accelerometers and gyroscopes act as their inner ear, helping them adjust balance in real-time. Think of it as giving robots a brain that can instantly recalculate walking strategies based on terrain.
Advanced models even mimic human biomechanics, allowing robots to tackle uneven surfaces with increasing confidence. Machine learning isn’t just teaching robots to walk—it’s giving them the ability to improvise and adapt on the fly.
Human Movement Biomimicry
You might think robots walk like clunky machines, but they’re actually copying your every move—studying how your muscles, joints, and nervous system collaborate to keep you upright and moving.
Researchers meticulously map human gait mechanics, translating the complex neural choreography of walking into mathematical models that help robots balance and navigate just like you do.
Human Gait Mechanics
When engineers peek under the hood of human walking, they’re basically witnessing a miracle of mechanical precision. Your body’s gait isn’t just moving—it’s a complex dance of biomechanics that two-legged robots are dying to copy.
Human balance isn’t magic; it’s science. Here’s what makes walking a mechanical marvel:
- Energy conservation through strategic joint movements
- Dynamic weight shifting that prevents constant falling
- Muscle coordination creating smooth, efficient locomotion
Every step you take transforms potential energy into kinetic motion, with your center of mass acting like a sophisticated pendulum.
Robots study this intricate choreography, learning how muscles and joints collaborate to create stability.
Think walking’s simple? It’s basically controlled falling—something even advanced two-legged robots struggle to master without looking like drunk toddlers.
Robotic Balance Principles
After watching humans glide effortlessly across uneven terrain, roboticists realized something profound: walking isn’t just movement—it’s an intricate ballet of physics and biomechanics.
When engineers design a robot, they’re basically trying to crack the code of human balance. By mimicking our locomotion patterns, they create mathematical models that help robots adjust their center of mass in real-time.
Sensors detect tiny shifts and ground contact, allowing the robot to make split-second corrections—just like you’d instinctively do when stepping on a wobbly surface.
Think of it as teaching a machine to “feel” its way through space, using advanced control algorithms that translate human-like responses into mechanical precision.
It’s less about building a robot and more about understanding how we actually move.
Neural Control Mapping
Because humans have spent millennia perfecting the art of walking, roboticists are now stealing our secrets—one neural pathway at a time.
Neural control mapping transforms humanoid robots from clunky machines into graceful movement mimics by studying how we naturally navigate the world. Your robot buddy’s walking skills now depend on cutting-edge biomimicry techniques that decode human locomotion:
- Machine learning algorithms analyze intricate muscle activations and joint movements
- Sensory feedback mechanisms simulate human proprioception for real-time balance adjustments
- Biomechanical models optimize energy efficiency by studying natural walking patterns
Imagine a robot that learns to walk like you do—adapting to uneven terrain, adjusting stride dynamically, and conserving energy with each step.
It’s not science fiction; it’s the fascinating future of robotic movement, where machines are learning to walk by watching and understanding the most sophisticated walking system on the planet: us.
Energy Efficiency in Two-Legged Robots
Battery burnout: the silent killer of robotic dreams. Ever wondered how a robot can perform without turning into an expensive paperweight? Energy efficiency isn’t just a buzzword—it’s survival for two-legged machines.
Lightweight materials and smart actuators are your robot’s secret weapons. Imagine a humanoid that recovers energy during braking, like a high-tech regenerative hybrid.
Lightweight robots: energy-harvesting warriors transforming motion into power, one smart actuator at a time.
These mechanical marvels use advanced algorithms to slip into low-power modes, potentially cutting idle energy consumption by 30%. Rechargeable lithium-ion batteries keep them strutting longer, while intelligent sensor designs optimize every single step.
It’s not just about moving—it’s about moving smartly. The future of robotics isn’t brute force; it’s precision, efficiency, and the ability to squeeze maximum performance from minimal power.
Welcome to the lean, mean, walking machine era.
People Also Ask About Robots
What Is Legged Locomotion of Robots?
You’ll discover legged locomotion as robots’ ability to walk using joint-driven movements that mimic biological systems, enabling them to navigate complex terrains dynamically by adapting their balance and gait through advanced computational algorithms.
What Is the Walking Mechanism of a Robot?
Imagine mechanical limbs dancing with precision. You’ll coordinate servo motors, gyroscopes, and sensors to mimic human walking. Your robot calculates center of mass, adjusts balance dynamically, and learns through algorithmic feedback, transforming robotic steps into fluid, adaptive motion.
What Are the Methods of Locomotion in Robots?
You’ll find robots can move through walking, rolling, hopping, crawling, and slithering methods. They adapt locomotion techniques like bipedal, quadrupedal, and multi-legged approaches, using dynamic balancing and terrain-specific movements to navigate complex environments efficiently.
How Do Humanoid Robots Move?
You’ll discover humanoid robots move through advanced algorithms and sensors that mimic human biomechanics. They dynamically balance using real-time feedback from accelerometers and foot switches, enabling precise, adaptive walking and maneuvering complex terrains with remarkable agility.
Why This Matters in Robotics
You’ve seen the future, and it walks on two legs. Robots aren’t just clunky machines anymore; they’re learning to dance through complex algorithms and mechanical wizardry. Just like human babies wobble before mastering walking, these mechanical marvels are evolving, falling, and getting back up. Soon, they’ll stride confidently beside us, blurring the lines between human and machine. The robot revolution isn’t coming—it’s already taking its first steps.
Explore the robot families that fit this use case.
Browse the robots, compare the models, and reserve the right one without buying.
Use Futurobots to move faster, stay flexible, and get access to advanced robots without buying.

Futurobots Team
Futurobots covers robot rental, buying decisions, event use cases, education use cases, and practical ways to use advanced robots without ownership risk.